
Peeter Vois, CEO and consulting engineer, Tauria
The communication focus for Internet of Things (IoT) has been mainly wireless with battery powered devices. For fixed installations where power consumption is much higher than a battery would provide during a 10 year period, wired power with wired communication would be needed. Example systems are heating, ventilation and air conditioning. Using wired communication would leave wireless space free for non-stationary communication.
On the physical communication layer the world has many wired protocols, like RS485, M-Bus and so on. We believe that for IoT the power demand for the communication must be even lower than the existing protocols provided. Today’s methods require careful wiring because the signal reflections on the bus will make the data reception fail.
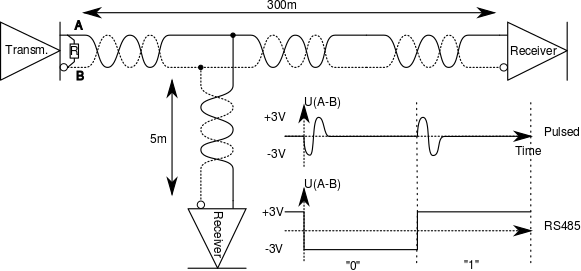
We are proposing a physical communication layer protocol that uses short pulsed signals. The data transmission rate will be comparable to RS485. We propose to transmit short pulses of energy on the bus network when the state of the transmitted information bit changes from “1” to “0” or from “0” to “1”. We propose electrical signalling that does have 3 states: “1”,”0” and “n”. State “1” is transmitted on the raising edge of signal voltage U between wires A and B. State “0” is transmitted on the falling edge of signal voltage U between wires A and B. State “n” means nothing is transmitted and the data remains “1” or “0”. Voltage at the bus state “n” is in the range -0.5V to 0.5V. The bus requires only one signal terminator R which must consume the reflected signal energy before the moment of the next pulsed signal transmission.
 Most of the time, the messaging bus would not be powered in state “n” contrary to the existing systems. Therefore, less energy is spent for the data transmission. The transmitter and the receiver can be designed to consume energy only when the short pulse is transferred.
Most of the time, the messaging bus would not be powered in state “n” contrary to the existing systems. Therefore, less energy is spent for the data transmission. The transmitter and the receiver can be designed to consume energy only when the short pulse is transferred.
The reflections on the bus network do not interfere with the data transmission because no reflections will arrive to the receiver before the first edge of the data pulse. The wiring becomes more robust in comparison to RS485.
The bus may be around 300m in length. Short branches in the range of 5 meters are permitted. Estimated half-duplex data rate would be 15.6 kB/s.
When the transmittable data does not change during the time of 4 bits, then the pulse of the last state will be re-transmitted for synchronisation of the receiver with the transmitter. The end of data frame (EOF) will be formed by keeping the transmitter in the state “n” during the time of 5 bits. The first pulse for bit “1” or “0” after the EOF is at the same time as the start of the data frame (SOF). Data is transmitted in multiples of full Bytes (8 bits).
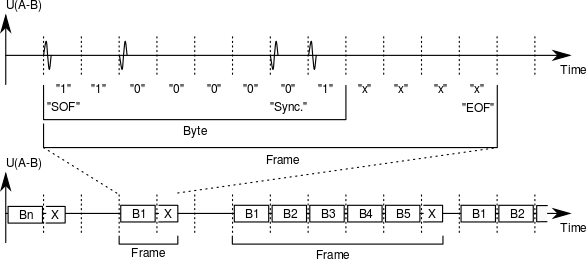 Partially transmitted Byte X must be discarded because it contains no data. Before ending the transmission with EOF, multiple Bytes can be transmitted in tight sequence. The Bytes transferred together will behave as a single stream of bits and there is no need to transmit a pulse at the beginning of every following byte.
Partially transmitted Byte X must be discarded because it contains no data. Before ending the transmission with EOF, multiple Bytes can be transmitted in tight sequence. The Bytes transferred together will behave as a single stream of bits and there is no need to transmit a pulse at the beginning of every following byte.
The described frame forming requires a Byte transmission time of 8 bits. In RS485 usually the UART frame is used. UART requires a Byte transmission time of 10 bits. The pulsed method has therefore a 25% higher data density at the same baud rate.
Energy spent for forming the signal on the bus is proportional to the voltage in square of the signal and the time length of the signal pulse inside the wire and inversely proportional to the impedance of the signal cable. When signal voltage and line impedance are the same compared to RS485 set-up, then the time length is going to be the only difference. In the case RS485, the voltage is constantly applied over the entire time of the frame transmission. In the pulsed method, the voltage is applied in short slices. As shown before, the amount of pulses depends on the message transmitted.
At the worst case, the binary message 10101010 or 01010101 requires one pulse for every bit. If the pulse duration is 1 micro second and the bit time is 8 micro seconds, then sending pulses on the bus requires 8 times less energy per data bit. UART transmits 10 bits per Byte and pulsed method transmits 8 bits per Byte. Sending pulses on the bus requires 10 times less energy per data Byte than with RS485 at the worst case.
At the best case, the binary message 00000000 or 11111111 requires 2 pulses: Start and Sync pulses. It is 4 times less than at the worst case scenario. The bit which requires a pulse is drawn in bold. At the best case the pulsed method requires 40 times less energy than RS485.
The real energy savings would be somewhere in between the best and the worst case scenarios. For example, the message “Hello World!” transmitted in the ASCII binary encoding (01001000 01100101 01101100 01101100 01101111 00100000 01010111 01101111 01110010 01101100 01100100 00100001) would require 51 pulses in total. This is on average 4.25 pulses per Byte and the savings per message is 18.8 times compared to RS485.
The shown signal encoding with short pulses is easy to implement in the hardware. It is possible to implement more complex encoding, where at the worst case scenario the energy savings would be 16 times compared with RS485. The best case scenario would stay almost the same and data density would be the same as for UART. Transmission of the “Hello World!” message would be 23.9 times more energy efficient than on RS485. Because of the high complexity of the mentioned encoding, it is left out from this article.




{kind=link}