
Mark Patrick, Mouser Electronics
Brushless DC motors are widely used in consumer appliances, industrial equipment, and automotive applications. They offer a more reliable and maintenance-free alternative than conventional brushed motors, but they do require more complex electronics to drive them. This article explores the common techniques, sensor methods, and algorithms available for driving a brushless DC motor. It also provides a guide to development and prototyping resources, and a summary of the latest motor driver ICs from leading suppliers.
Rise of the Brushless Motor
There are few applications in our lives that do not rely on brushless DC (BLDC) motors. These devices are found in diverse consumer applications, such as battery-powered hand tools, refrigerators and domestic vacuum cleaners. The industrial sector uses them in everything from conveyor belts to production robots. BLDC motors are also indispensable in automotive applications, with electric vehicles providing new opportunities.
A recent study estimates that the global market for brushless DC motors will reach $ 72.2 billion by 2030, up from $33.2 billion in 2020 (Figure 1). The ‘Brushless DC Motors Market Research, 2030’ report by Allied Market Research predicts a 10.3 percent compound annual growth rate across all motor ratings, with the 750W to 3000W category experiencing the most significant increase.
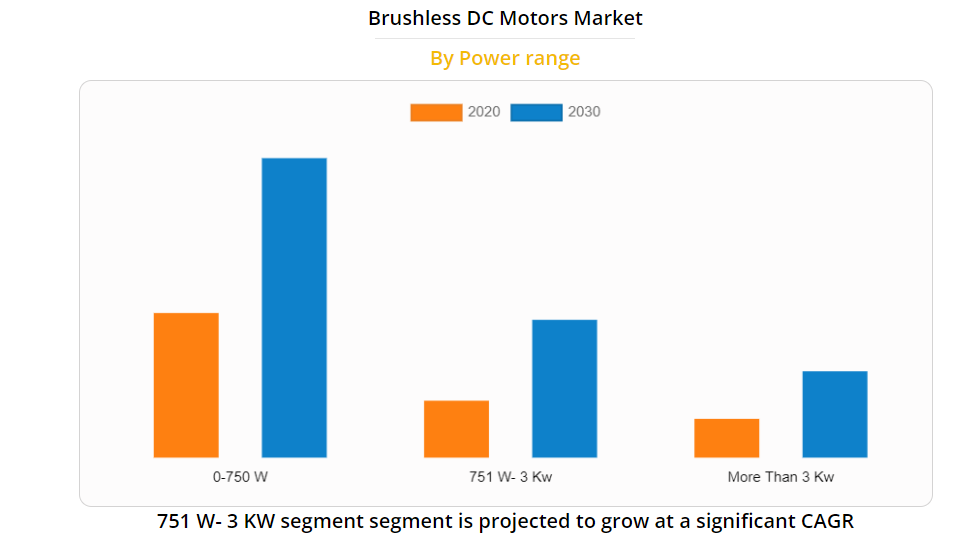
Figure 1 – Growth in BLDC motors 2020 – 2030 – from Allied Market Research report (Source: AMR – https://www.alliedmarketresearch.com/brushless-dc-motors-market – permission requested)
There are several reasons for the popularity of BLDC motors. They are low maintenance and offer high energy efficiency – typically up to 92 percent (at least 10 to 15 percent more than an equivalent size brushed motor). Their brushless design removes friction and means BLDCs can operate at higher speeds. Eliminating brushes also contributes to a more compact size, low audible noise, and a significantly reduced EMI profile. It is these characteristics which make BLDCs the ideal motive drivetrain component for electric vehicles, where high torque and high-speed are crucial.
However, BLDCsare generally more expensive and have complex drive requirements. The pros and cons of several popular motor configurations are illustrated inFigure 2. Although slightly different in their operation and the internal construction of the stator windings, BLDCs are similar to permanent magnet synchronous motors (PMSM).
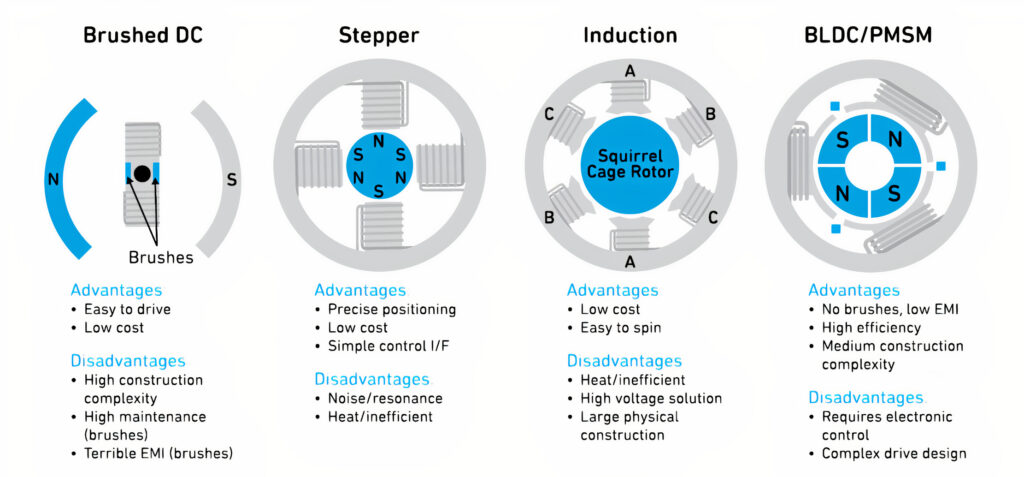
Figure 2 – Popular DC motor types illustrating key advantages and disadvantages (Source: Qorvo)
How Does a Brushless DC Motor Work?
To understand the difference in the operation of a BLDC or PMSM, we need to define some essential motor terminology:
Windings: Coils of copper wire placed either on the stator or rotor. They function as electro-magnets, generating a magnetic field according to the direction of current flow. For example, the BLDC in Figure 2 has three windings, which can be wired in series to create a single-phase motor or wired individually for a three-phase motor.
Rotor: The rotating part of the motor. In a brushed motor, the windings around the rotor receive energy via the brushes. In a brushless motor, the windings are on the stator and permanent magnets surround the rotor. A small air gap exists between the rotor and the stator.
Stator: The non-rotating part of the motor. Figure 2 illustrates the magnetic poles of the stator in a brushed motor. By contrast, the stator in the BLDC contains non-rotating windings.
Commutation: The method of alternating the direction of current flow in a winding to achieve rotation.
Back-EMF: Back-electromotive force is the electrical energy created in a winding as it passes through a magnetic field. In the case of a BLDC, the back-EMF comes from the rotor’s permanent magnets. Back-EMF can be used to sense the rotor’s position relative to the stator windings and, therefore, to drive the commutation process.
The difference between a PMSM and a BLDC is primarily the shape of their stator windings and, consequently, the characteristics of the back-EMF waveform created (Figure 3).
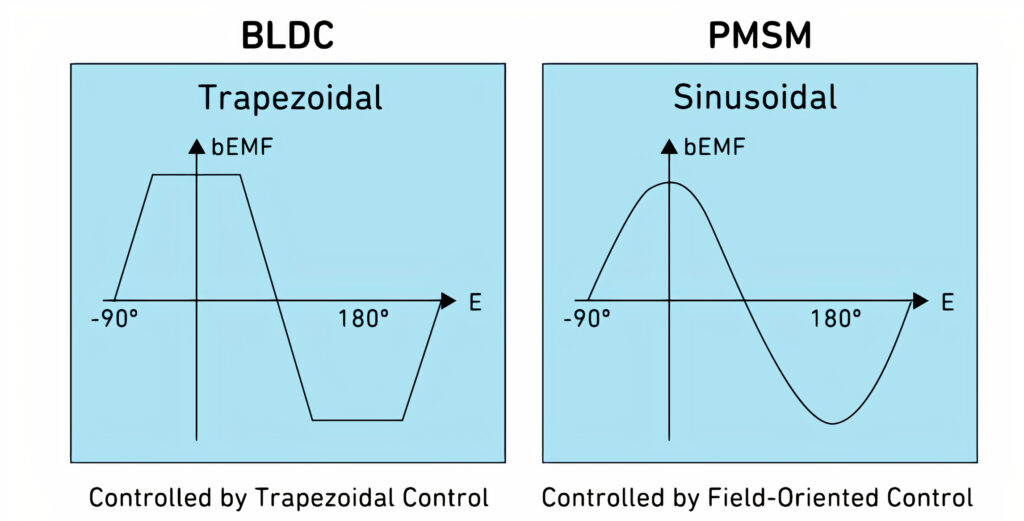
Figure 3 – A comparison of the back-EMF waveforms created by BDLC and PMSM motors (Source: Qorvo)
The Role of Algorithms and Sensors
Achieving rotation in a BLDC or a PMSM involves commutation with drive signals applied to the stator windings. Semiconductor-based motor drive controllers (commonly called drives) create waveforms, the number and shape of which are determined by the motor type and the number of phases. A BLDC motor suits a trapezoidal-shaped drive waveform, compared to a sinusoidal waveform using a field-oriented control (FOC) approach for the PMSM (see Figure 3). A BLDC motor can also be driven using a sinusoidal waveform.
Whether using a FOC or a trapezoidal drive, knowing the exact position of the rotor relative to the stator windings is essential for effective rotor control. This positional information provides essential feedback to the motor drive, controlling motor speed and torque. It determines the drive signals’ sequencing, timing, and frequency.
There are two ways to determine the rotor position: sensor or sensorless.
Sensor: Hall-effect sensors placed beside each stator winding detect the changes in magnetic field polarity (N to S, S to N) as the rotor rotates. These sensors are shown as small blue squares in Figure 2. A three-phase motor requires three sensors.
Sensorless: A sensorless approach uses the back-EMF to determine the rotor’s position.
Each sensing method has its pros and cons. Using Hall-effect sensors adds to assembly time and component costs. On the plus side, sensored BLDC/PMSM motors offer excellent torque, smooth rotational motion, and high efficiency.
Using FOC demands the use of sensors due to driver complexity. The sensorless approach is prevalent for BLDC motors, which makes them generally cheaper than PMSMs.However, a sensorless approach requires algorithms to determine rotor position based on the back-EMF. This can be challenging during start-up, when lack of movement means there is no back-EMF. Typically, this is overcome by feeding high-frequency drive signals to each phase winding, and an algorithm calculates the position accordingly.
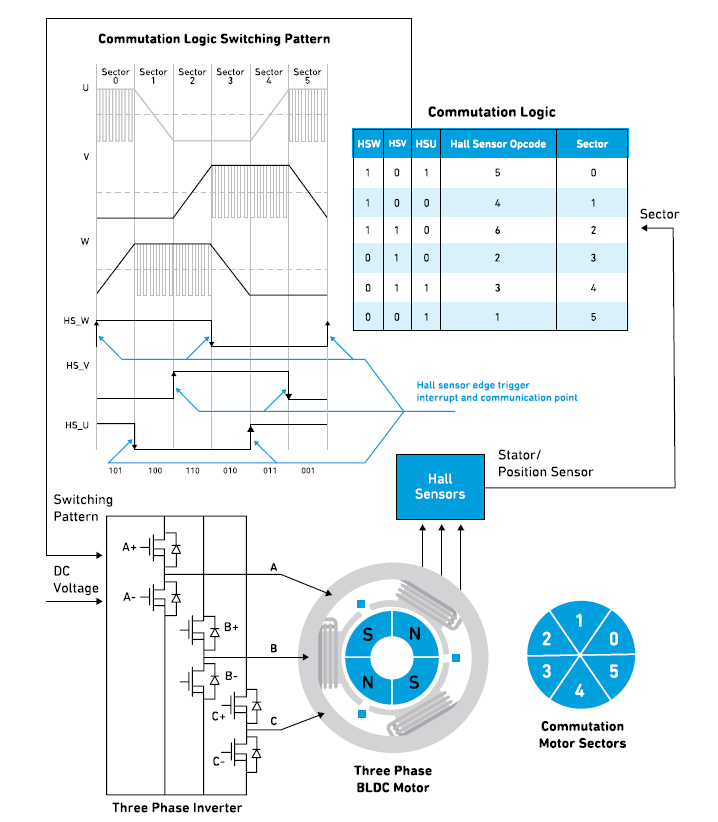
Figure 4 – A simplified diagram of a three-phase BDLC motor using Hall-effect sensors to create the commutation process and sequence the inverter operation (Source: Qorvo)
Figure 4 highlights a simple three-phase BLDC motor configuration using Hall-effect sensors – HSW, HSV, and HSU. The sensors are essentially digital switches, using ‘1’ for north and ‘0’ for south to indicate the polarity of the detected magnetic field. The combined output of the three sensors forms a 3-bit digital logic ‘opcode’ that indicates the rotor’s position and the direction as it changes. This information provides the basis of the drive signals to the three-phase power transistor inverter stage. For relatively low-power BLDC applications, the sensor interface, motor controller, and drive transistors are typically integrated into a single controller IC. High power motors typically take the gate drive output from the controller IC and employ heatsinked powermetal-oxide-semiconductor field-effect transistors(MOSFETs) to achieve the desired drive current.
To vary the motor’s speed, a pulse-width modulation (PWM) technique changes the duty cycle – the ratio of pulse on/off. This method is also advantageous during motor start-up to limit the initial current.
BLDC Motor Drive ICs and Development Resources
A wide variety of BLDC motors are available today, alongside resources to help engineers achieve the optimal design for their application.
One recent introduction is the TI DRV10963from Texas Instruments (see functional block diagram in Figure 5). This low-power sensorless three-phase BLDC motor driver is particularly suited for driving cooling fans used in laptops and on high-performance processors. The DRV10963 incorporates three power MOSFETs and accommodates BDLC motors up to 5 V / 0.5 A. It also features short circuit and over current protection, provided by monitoring the current and voltage of each MOSFET through a multiplexed analog-to-digital converter (ADC). A PWM input can be used to achieve the desired motor speed. The ‘FR’ input allows changing the motor direction at start-up, and the ‘FG’ output provides motor speed information.
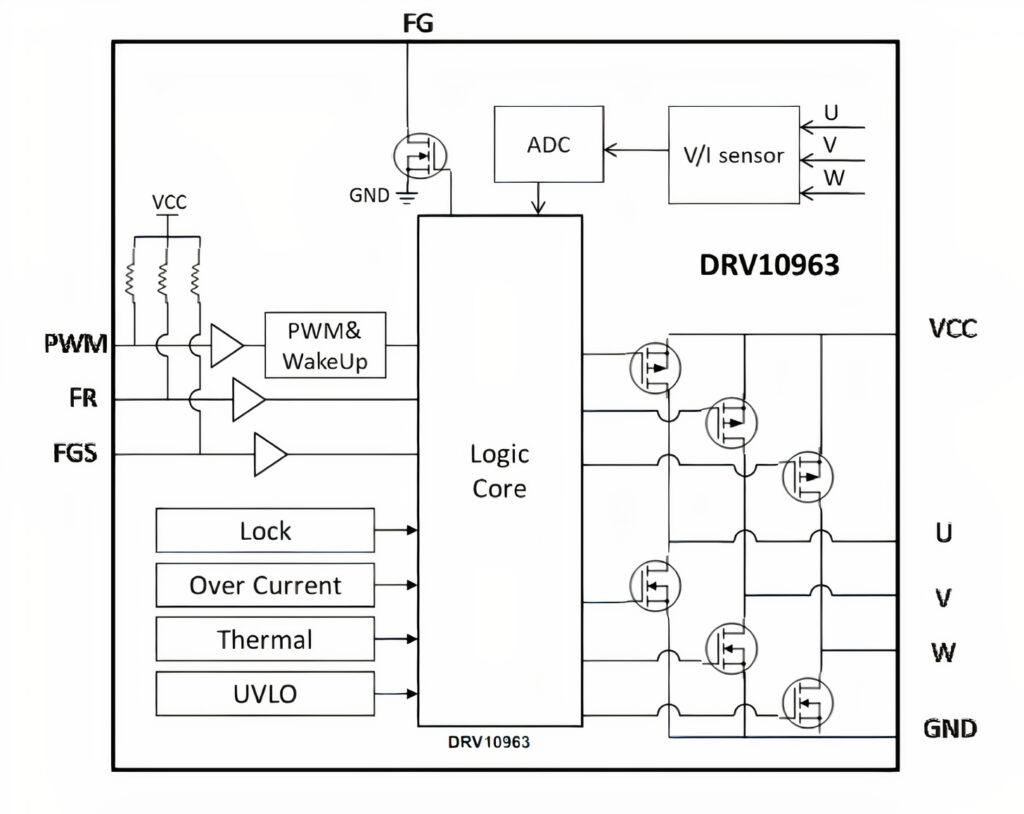
Figure 5 – The functional block diagram of the TI DRV10963 5 V three-phase sensorless BLDC motor driver (Source: TI)
Microchip offers a comprehensive portfolio of single-chip BLDC motor drivers and gate driver ICs. An example is the MCP8063, a 3-phase brushless sinusoidal sensorless motor driver designed for automotive cooling fan and pump applications.
A wide range of high-speed consumer, industrial, and automotive motor control applications, including battery-powered power tools, e-bikes, and light hybrid electric vehicles, can be met using the Qorvo PAC5532 power application controller. Suitable for use with 48 VDC to 120 VDC systems, the PAC5532 integrates a 150 MHz Arm Cortex-M4F 32-bit core with comprehensive and configurable power management and drive functions(Figure 6).
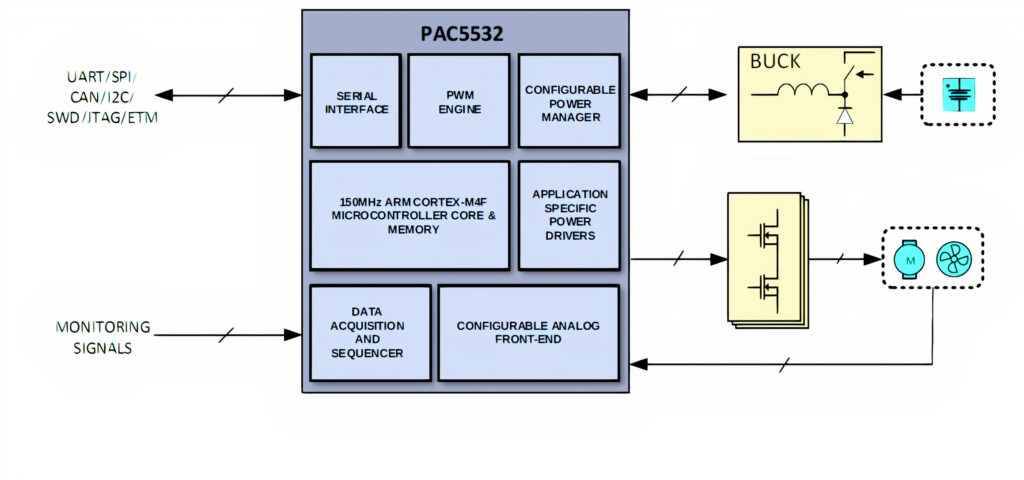
Figure 6 – A simplified application block diagram of the Qorvo PAC5532 in battery-powered motor control applications (Source: Qorvo)
Complementing the PAC5532 is the Qorvo PAC5532EVK1 evaluation kit (Figure 7). This includes the PAC5532 and the three-phase half H-bridge inverter components. A GUI-based software development kit is also available for download from the Qorvo website.
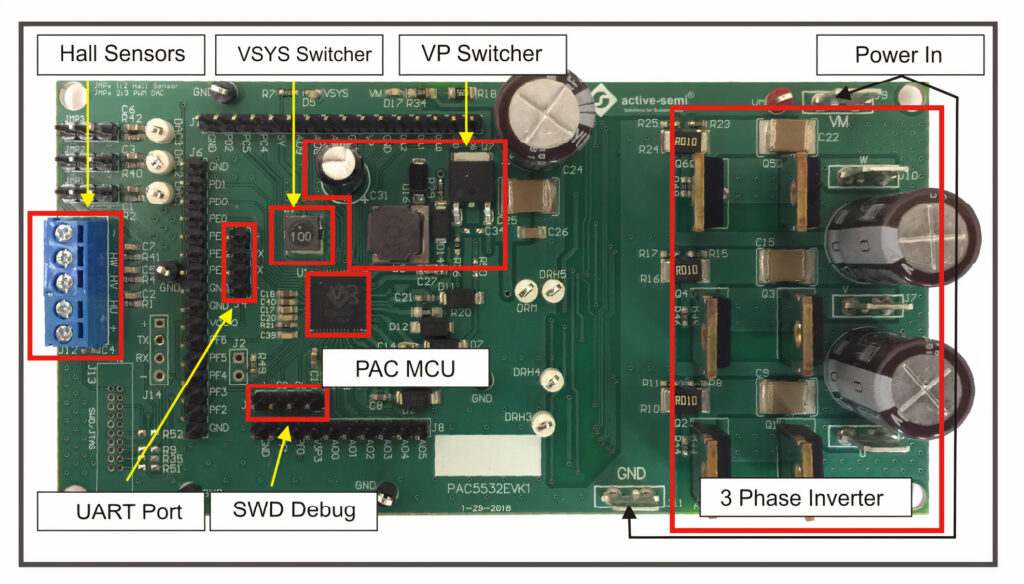
Figure 7 – the major components of the PAC5532EVK1 evaluation kit (Source: Qorvo)
Another motor control IC is the high-performance Renesas RA6T2 microcontroller series. Based on a 240MHz Arm Cortex-M33 microcontroller core, the RA6T2 includes a hardware-based accelerator for speeding up complex motor control algorithms and running secure cryptographic functions. A full-featured set of analog functions include a 12-bit analog to digital converter (ADC), a 12-bit digital to analog converter (DAC), programmable gain amplifiers, and high-speed comparators (Figure 8).
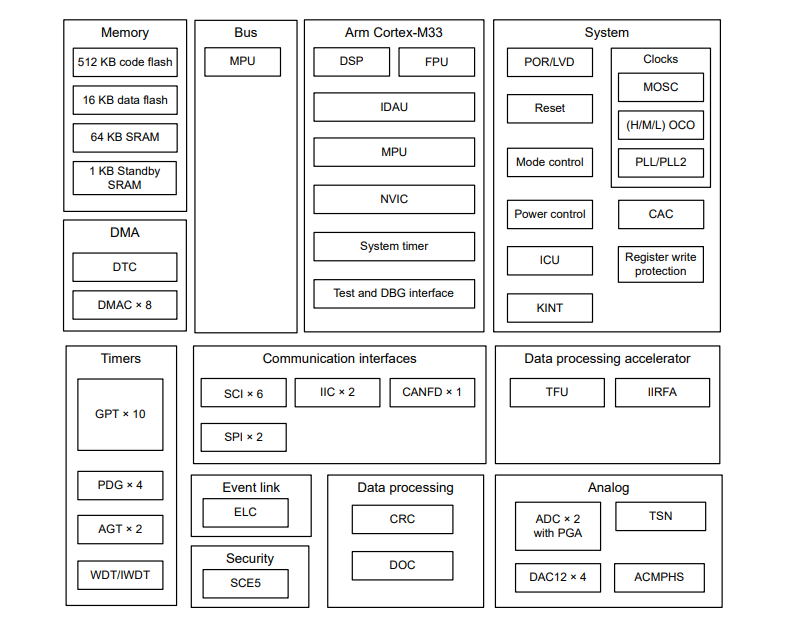
Figure 8 – The functional block diagram of the Renesas RA6T2 microcontroller-based motor controller IC (Source: Renesas)
Renesas also offer the MCK-RA6T2 evaluation kit, which provides a convenient and practical method of prototyping a brushless motor driver design. Comprising three connecting boards – inverter, microcontroller, and communications – the kit also includes a small brushless DC motor and all required cables. The functional architecture of the MCK-RA6T2 is illustrated in Figure 9.
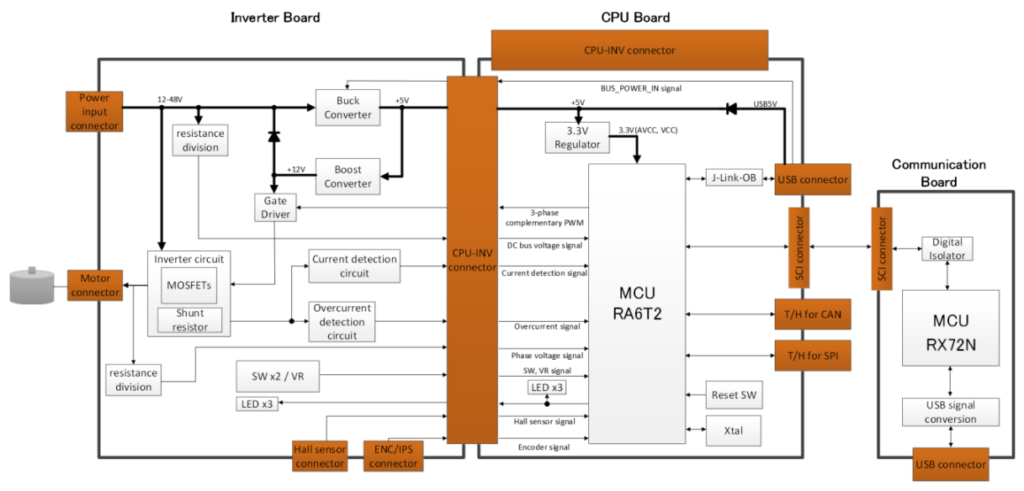
Figure 9 – A functional block diagram of the Renesas MCK-RA6T2 brushless motor evaluation kit (Source: Renesas)
Looking forward
BDLC motors offer several cost and efficiency benefits, and new applications are emerging all the time. Engineers therefore need to understand the technology and how to optimize performance for each use case. The information and use cases in this article illustratehow BDLCs function and the design criteria to consider. The leading semiconductor solutions showcased in the last section offer a convenient, well-documented, and trusted approach to getting started with your first BDLC/PMSM design.
Mouser Electronics
Authorised Distributor
www.mouser.com




{kind=link}