


By Giacomo Tuveri, Marketing Industry Manager, Automotive and Energy Solutions, Keysight Technologies.
Get ready. The future of mobility is getting ever closer.
 Recent developments in the automotive sector provided a glimpse of future mobility with autonomous driving – safer roads, improved road usage and traffic efficiency, lower emissions, the introduction of self-driving uber-like services and possibly changes in city landscapes towards a more sustainable urban living.
Recent developments in the automotive sector provided a glimpse of future mobility with autonomous driving – safer roads, improved road usage and traffic efficiency, lower emissions, the introduction of self-driving uber-like services and possibly changes in city landscapes towards a more sustainable urban living.
Autonomous driving is no longer just a concept. Self-driving vehicles are already hitting the road in some countries. The connected car is already here in many ways with advanced telematics becoming more and more available on a wide range of vehicles, Advanced Driver-Assistance Systems (ADAS) and Vehicle-to-Everything (V2X) almost a reality. This article focuses on the enabling technologies which pave the way towards the vehicles of the future.

Sensor fusion
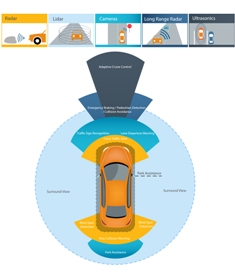
The adoption of sensors which are a fundamental part of a vehicle’s ADAS system gains dramatic increase – pushing up the overall electronic content of newer vehicles. This is made possible by advances in electronics which enable for lighter, smaller and more affordable sensor solutions. Sensors in ADAS play an important role to enhance situational awareness of the driver thereby improving safety of both drivers as well as other road users. The increase use of sensors will drive cost further down and more vehicles will have them fitted.
In automotive, ultra sound sensor technology is highly mature. Ultrasound sensors are widely used as they are inexpensive and simple to implement. Due to the propagation characteristics of sound, ultrasonic sensors are only used in short range and low speed applications such as self-parking and blind spot detection.
Since the introduction of radar for automotive, radar sensors have become an integral part of ADAS. They are used in the short-, mid- and long-range detection of stationary and moving objects, providing important information such as distance, angle, and velocity. Unlike technologies like LiDAR and other vision systems such as cameras, they are less affected by weather and lighting conditions. Due to its robust sensing capabilities, radar is used innumerous safety applications such as adaptive cruise control, collision avoidance, and autonomous emergency braking.
The automotive short-range radar systems are currently permitted to operate in two frequency bands, namely the K band (24 GHz) and W band (79 GHz). The use of the lower frequency K band will be phased out of new vehicles in Europe at the start of 2022 to protect other users in the 24 GHz band[1]. The move towards higher frequencies not only alleviates spectrum crowding or interference in the lower frequencies but also presents benefits such as smaller sensors and the allowance for higher spatial resolution with wider operating bandwidths.
Vision based systems are evolving with smaller, higher resolution and stereo vision cameras. They prevail where radar sensors fail in object recognition and image classification. Camera sensors are relatively low cost but require high processing power. Good quality images can be obtained under favorable lighting and weather conditions but poor quality otherwise.
LiDAR and infrared are emerging technologies for automotive applications. Neither are extensively used due to their high cost. LiDAR sensors provide high resolution 3Dimaging which will be critical for autonomous driving. However, like camera sensors, they are sensitive to weather conditions. Infrared sensors on the other hand, provide night vision capabilities. These sensor technologies will need to be more affordable to be attractive for widespread use in automotive.
Since different sensors have their own specific advantages and limitations, the industry is adopting the use of multiple different types of sensors which takes advantage of each other’s unique strength and reduces the effects of any limitations. The term being used to describe this trend is called Sensor Fusion. The diversity and redundancy in sensor fusion is deemed necessary to enable the vehicle more accurate and reliable perception of its surroundings.
[1]https://ec.europa.eu/digital-single-market/en/content/radar-your-car
V2X communications
Autonomous vehicles require more connectivity beyond ADAS’s network of sensors. V2X is a key technology enabler to enhance the vehicle’s perception of its surroundings by enabling the vehicle to communicate with other vehicles and its environment. The concept involves the ability of vehicles being able to exchange messages to and from other vehicles (V2V), network (V2N), pedestrians (V2P) and infrastructure (V2I). There are potential lifesaving benefits as V2X communication brings a new level of situational awareness leading to increased road safety as well as traffic efficiency.

The WiFi radio access technology was initially selected as a candidate for V2X for its direct communication among nodes and low latency. The new derivative standard, IEEE 802.11p (also termed as ITS-G5(Europe) or DSRC (North America)) was specified and designed to meet the stringent performance specifications required for Intelligent Transport Systems (ITS) applications. Many field trials have been carried out in the recent years, making the WiFi based V2Xrelatively mature and almost ready for deployment.
Presently, Cellular V2X (C-V2X), based on R14 of 3GPP Long Term Evolution (LTE) cellular technology, is also making its case as a contender for V2X communication. Proponents of C-V2X highlight some of the advantages of a cellular based system over an ad-hoc WiFi based system (better security, congestion control, reliability, etc) as well as the ability to leverage the existing cellular infrastructure (V2N). In addition, 3GPP R14 enhances the ‘PC5 Sidelink’ interface for Direct Communications allowing V2V communications between vehicles. Finally, as a part of the 3GPP standards family, C-V2Xoffers an evolution path to 5G.
So, there are two distinct technologies to be considered for Cooperative ITS (C-ITS): 802.11p and C-V2X. While there is a debate on which technology is better suited for V2X, there are also some interest to make both technologies coexist to leverage the best of both since they share a common goal, i.e. realizing a safer and more efficient mobility for all.
V2X communication is regarded as necessary to attain higher levels of automation (SAE J3016[1])as this gives vehicles non-line of sight awareness enhancing both the ability of the driver and any autonomous system to be even more aware of unseen dangers. It is predicted that 5G,which will be a URLLC (Ultra Reliable Low Latency Communication) technology, will bring about even more enhanced safety performance from the network.
Secure in-vehicle communication networks
Modern vehicles are powered by a continuous growth of electronics and embedded software. Automotive applications like surround view, on-board diagnostics, infotainment, and telematics are driving up the bandwidth requirements. With increasing intelligence as enabled by sensor fusion and V2X communications, a need emerged for reliable, high-speed communication network to support real-time transfer and processing of data within the vehicle.
The OPEN (One Pair Ethernet) Alliance[2] was formed to establish Automotive Ethernet as an open standard and to encourage wide scale adoption of Ethernet connectivity in automotive. The Ethernet is a relatively new in-vehicle point-to-point communication technology. It was introduced to address the automotive’s increasing need of bandwidth coupled with reduced cost, weight and complexity as compared to existing in-vehicle wired communication technologies. The modular setup of Ethernet transceivers, switches and controllers also allows for scalability and flexibility.
Ethernet communication network is seen to be a key infrastructure component for future autonomous driving and the connected car. The trend for automotive wiring harness is moving from heterogeneous networks of proprietary protocols (e.g. CAN, MOST) to hierarchical homogeneous automotive Ethernet networks as shown in Figure 3. The IEEE standards association is currently working to add Time Sensitive Networking (TSN) features to the existing standards for 802.1 and 802.3 Ethernet to provide deterministic performance, which is vital for real-time, mission critical applications. With the inclusion of the TSN feature, Ethernet is poised to become the core network backbone meeting the complex demands of future vehicles.





{kind=link}